PoLaRIS-Dataset
Why PoLaRIS-Dataset?
Unmanned Surface Vehicles (USVs) require precise object recognition for safe navigation but face challenges such as irregular lighting and unpredictable obstacles. However, existing maritime datasets have two major limitations:
- Sensor Reliability: Poor performance under challenging lighting, with limited multi-sensor integration.
- Dynamic Object Tracking: Insufficient tracking of long-range or small objects, critical for USV collision avoidance.
To address these issues, PoLaRIS-Dataset introduces the following key contributions:
- Multi-Scale Object Annotation: Manual refinement of large and small object annotations, initially generated by an object detector.
- Dynamic Object Tracking: Comprehensive tracking annotations to enhance navigation performance.
- Multi-Modal Annotations: Stereo RGB, Thermal Infrared (TIR), LiDAR, and Radar data annotated using a semi-automatic, human-verified process.
- Benchmark Validation: Evaluations with conventional and SOTA methods demonstrate the dataset's effectiveness in maritime environments.
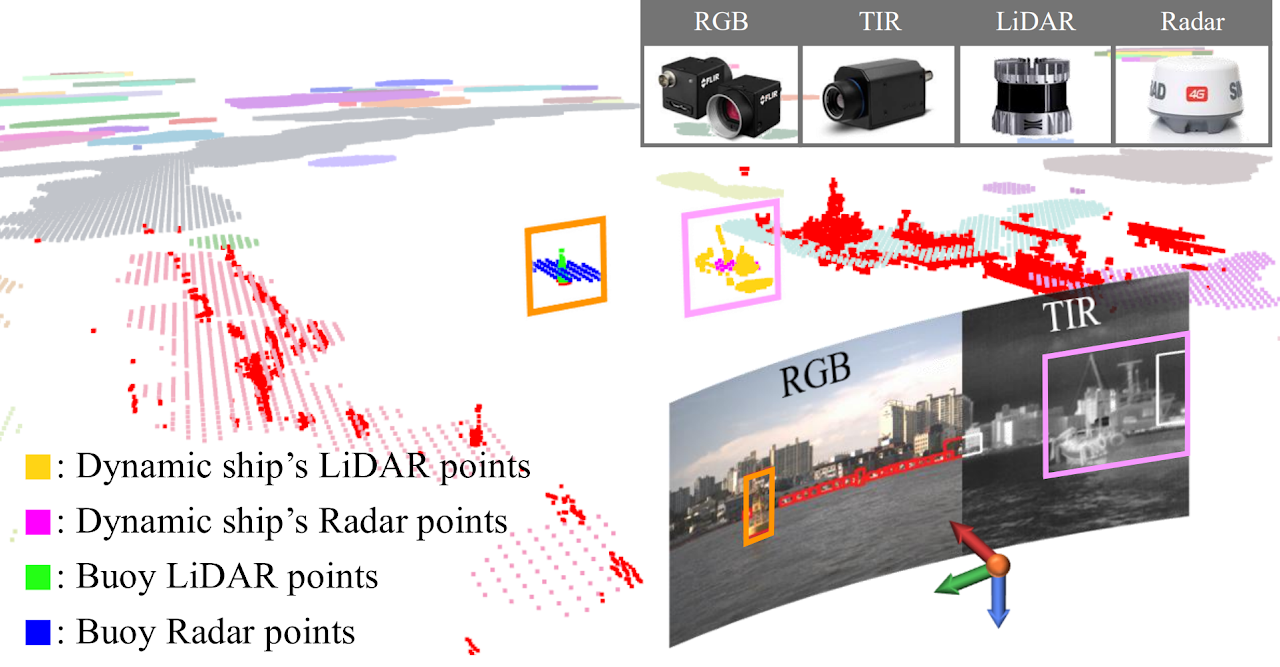
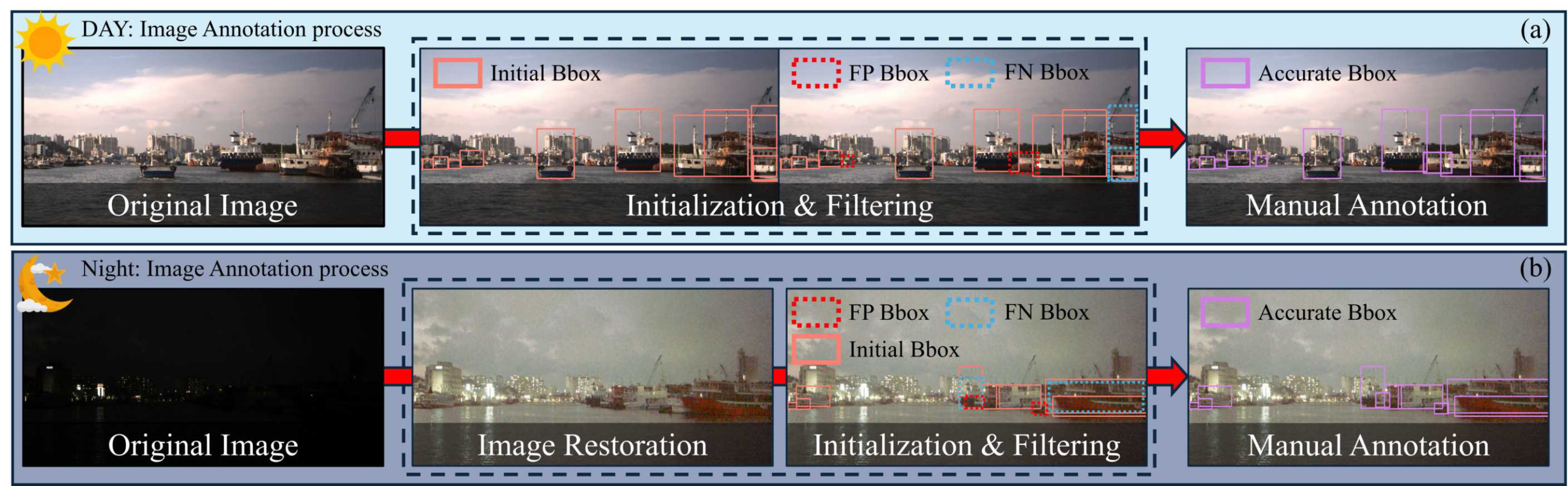
Image Annotation Process
Stereo Left Camera (RGB)
Daytime
- One image is manually sampled every 20 images to create a training set.
- Remaining images are initialized using YOLOv8 detections, with overlapping boxes (IoU ≥ 0.8) removed.
- All small objects (occupying less than 5% of the image size) are manually annotated.
Nighttime
- Low-light images are enhanced using a diffusion-based GSAD method instead of relying on noisy TIR images.
- Manual annotations are performed on the enhanced images.
Stereo Right Camera (RGB)
- Initial bounding boxes are transferred from the left image annotations.
- Manual corrections are applied to account for differences in field of view (FOV).
Semi-Automatic Annotation
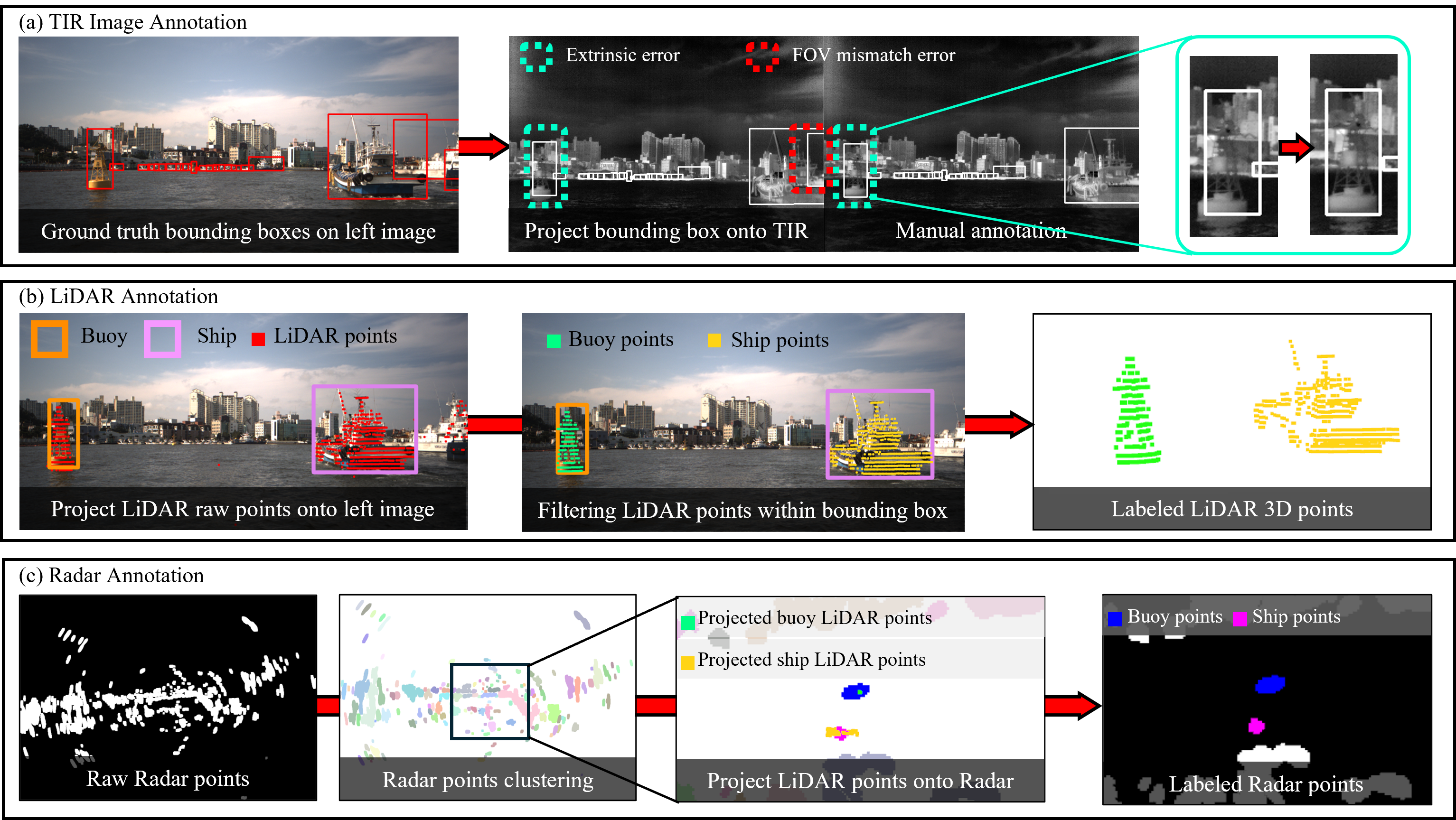
TIR Images
- Annotations are transferred from the left camera using extrinsic parameters.
- Transformation formula:
- Manual corrections are required to address FOV differences and transformation errors.
- 16-bit TIR images are converted to 8-bit using Fieldscale for better visualization before manual refinement.

LiDAR Points (from lidar_front)
- LiDAR points are projected onto the left image based on extrinsic calibration.
- Points outside the bounding boxes are filtered out.
- Manual verification ensures accurate object shape representation.
Radar Points
- Radar annotations are generated through fusion with LiDAR data.
- The annotation process includes:
- Converting LiDAR-labeled points into Radar BEV coordinates.
- Clustering Radar points using the DBSCAN algorithm.
- Assigning annotations by matching Radar clusters with labeled LiDAR points.
- This approach reflects Radar's characteristics and enhances annotation accuracy.